Coherent Methodology for Modelling and Design of Soft Material Robots "The Soft Material Robotics Toolbox - SMaRT"
| Leitung: | Dr.-Ing. Matthias Wangenheim |
| E-Mail: | berthold@ids.uni-hannover.de |
| Team: | M. Sc. Rebecca Berthold (Kontaktmechanik von Elastomeren) |
| Jahr: | 2019 |
| Förderung: | DFG |
Im Vergleich zu ihren starren Gegenstücken zeichnen sich Robotersysteme aus flexiblen, weichen Materialen insbesondere durch signifikante Vorteile bei der Mensch-Roboter-Kollaboration sowie beim Handling von Objekten mit unbekannter Geometrie oder unregelmäßiger Oberflächentopologie aus. Die Entwicklung von soften Robotern ist jedoch eine Herausforderung, da bis heute keine generische Methodik für eine zielgerichtete Entwicklung von soften Robotersystemen existiert. Ziel des Projektes ist es diese Lücke zu schließen und die Vorteile der soften Roboter durch die Entwicklung einer universellen Modellierungsmethode in unterschiedlichen Anwendungsfällen nutzbar zu machen.
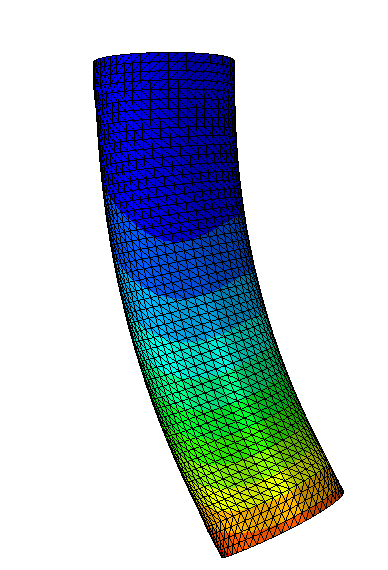
Der Fokus der Modellierungsmethodik liegt auf einer nahtlosen Beschreibung der Statik, Kinematik und Dynamik von soften Robotersystemen. Für die Darstellung relevanter Aspekte, wie z.B. Material-Nichtlinearität, große Dehnung und Verformung, wird zunächst ein Finite-Elemente-Modell verwendet. Diese Finite-Elemente-Modelle sind jedoch viel zu komplex für umfangreiche Untersuchungen und eine zielgerichtete Synthese und Anwendung von soften Robotersystemen. Ihre üblicherweise sehr hohe Anzahl an Freiheitsgraden wird systematisch reduziert, um Modelle zu erhalten, deren Rechenaufwand angemessen ist, während sie dennoch alle relevanten Aspekte des Gesamtsystems beschreiben. Aus dem reduzierten Modell werden kinematische und dynamische Modelle abgeleitet, die eine gute Grundlage für die anfängliche Entwicklungsphase liefern. Hauptergebnisse dieses Projekts sind ein Framework sowie die nötigen experimentell validierten Methoden und Werkzeuge, um generische Modelle von soften Robotersystemen zu erhalten, die beispielsweise für die Gesamtsystemsynthese, die Bewegungsplanung, das Steuerungsdesign und die modellbasierte Optimierung von soften Robotersystemen verwendet werden können. Sie werden die Grundlage für die zukünftige Forschung und Entwicklung von neuartigen soften Robotern in Medizin, Industrie und anderen Anwendungsbereichen bilden.





